Histogram of Template for Pedestrian Detection¶
Summary:¶
- 这篇文章主要讲述的一项技术称为Histogram of Template, 它主要的定义是针对图像中的每一个像素,进行各种样板的定义,每个样板包括了此像素及其相邻2个像素。如果这样一个3个像素组成的测试单元在特点和梯度值上满足预设的方程,那么称此中心像素为这个方程的一个样板。这种技术的主要特点和优势在于:1 它不仅仅针对一个像素,而是同时考虑3个像素之间的关系。 2 它考虑了像素本身的特性和梯度。
Introduction:¶
对于人物识别的介绍:¶
- 主要的识别方法有两种:
- 提取特点:
人物识别技术正被广泛使用,但目前仍有许多难题,最为显著的有3点: 1 人物呈现的不确定性很大。 2 衣服和皮肤对于识别的影响。 3 背景,灯光等因素的影响。
梯度信息和特点信息两者对于人物识别非常重要,但当两者独自实现时却不能得到较好的效果: 前者在背景较为复杂、图像像素较低的条件下难易识别; 后者则必须在与其他方法合用的条件下才能识别。
- 瞄准识别方法:
关键部件有两个: 1 SVM ,其优点是易于瞄准,全局优化被保证。 2 增压法 , 与级联策略一同使用,节约检测时间,多运用于实时检测。
- 研究方向:
- 寻找更多趋于特点加以区分
- 寻找更有效瞄准方法
对于本文的介绍:¶
- 文章主要针对第一个研究方向,从特点中提取信息并将其一致化,这样的好处在于:
- 可以有更强的区分能力
- 在一个样板中体现多像素,获得高识别率
- 计算机的复杂度降低
算法分类:¶
- 此算法基于局部特点进行比较,当有一幅新图像时,将其中相对应的局部特点提取,与之前的进行比较分级。
- 此算法基于局部现象,利用感兴趣点周边的补丁构成一个编码集,并通过这个编码集来寻找最合适的点。
- 此算法基于凹槽匹配,利用人形模板去图像中最适合,最匹配的边缘映射。
Feature Extraction:¶
早先的方法及缺点:¶
- 主要的方法有两种:
- HOG: 将图像分为“块”,每一块有4个单元组成,每个单元是一个9维的向量。
- COV: 计算一个8维的向量。

- 两者的特点就是都是通过对于斜率,坡度的信息进行图像的分析处理。
- 缺点:
- 仅仅关注于斜率信息,忽略了图像本身的特点。
- 此外,对于同一斜率,会出现多种情况,无法进行判断。
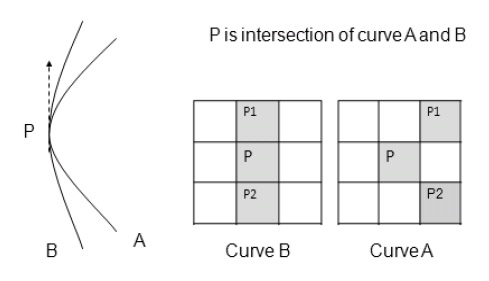 如图中的A和B都可能是出自同一个斜率。
如图中的A和B都可能是出自同一个斜率。
HOT算法分析:¶
- 首先其算法结合了斜率信息和图像特点信息,具体算法如下分析:
- 图像特点信息:首先设置不同的模块,本文中基本模块为8个,实际模块为12个,为了提高精确度。其次根据方程(7)寻找出模块中的最大值(像素)。最后通过统计每种模块的个数来分析图像的形状和特点。方程(8)是选择出所有模块中值最大的(图像信息中最基本的,最明显的,如人的外形轮廓),其余的模块则是用来进一步精确并细化图像。
- 斜率信息特点:其算法原则基本与图像特点相同


- 优点:
- 不仅关注斜率信息,同时关注图像特点。
- 更为宏观,从原先的像素级提高到了模块级。
- 亮度恒定,不需要正规化。
Training Method:¶
- 为了保证实验中,不同特点的平等性,需要运用瞄准技术,本实验中运用的是SVM。
- 其优点在于在高维度小样本的中,通过核心函数寻找适合的参数,瞄准时间短等。
- 缺点在于只能运用在子窗口固定的实时应用中。
实验及其结果分析:¶
实验分类:¶
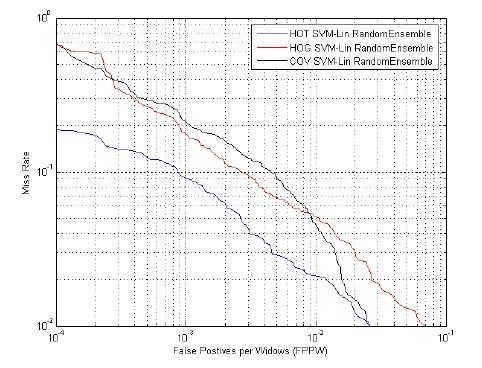
实验1.用HOT技术与HOG和COV进行比较- 测试相同条件下,三种技术的对比,结果为,在相同的条件下,HOT的特征长度要小于HOG和COV,这意味着计算机复杂度和存储消耗更少。此外,HOT还有更高的识别率。
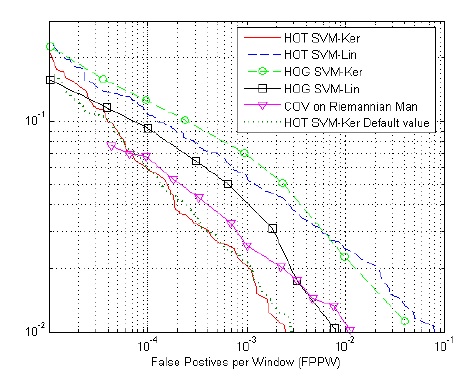
- 当子窗口大小变化时,时使得模块和块间线条的影响减到最小,结果仍为HOT有最好的特性
- 模板越多,性能越优,这是因为模板多了,得到的信息多了,自然准确性上去了,错误率下降。不过需要注意的是,当模块过多时,会导致计算计算机复杂度上升,运算时间加大,因此需要在两者时间折中,实验给出的答案是8模块或者12模块最佳。

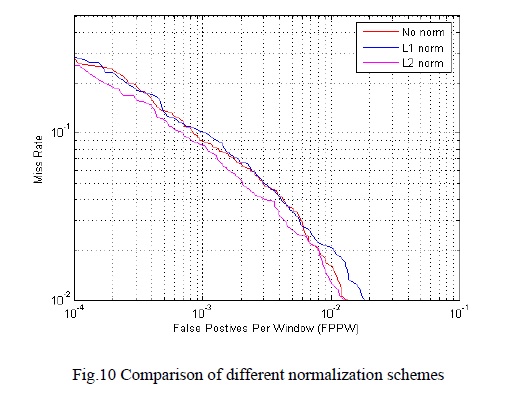
- 主要测量的参数有2个:子窗口的大小和子窗口之间线条的数量。 主要的瞄准方法有2个:标准化和非平衡化
测量结果表示: - 在HOT中,由于是亮度不变,因此运用瞄准方法对HOT技术虽然有好处,但并没有非常大的作用。
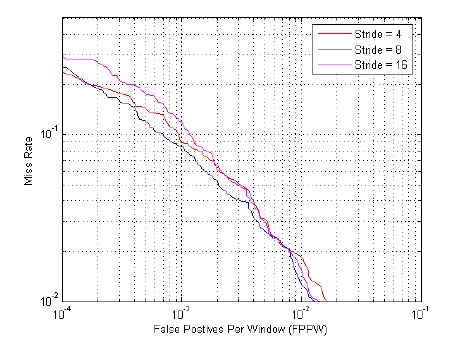
- 改变参数设置发现,子窗口越大,效果也好,因为K之增大意味着更多信息被获取。

- 改变模块之间的线条个数发现,线条越少,特征长度越长,这是因为线条少了模块就增多了,导致计算特征长度时,模块数量加大,特征长度增加。
心得体会:¶
阅读完文章后对于HOT技术有了较为深入的理解,首先其相对于之前的技术来说,可以说是一个更为综合,更为宏观的技术,将斜率信息和特点信息进行了融合,并且从中间级进行识别,并非之前的像素级,从而使得识别能力大大上升,另外也避免了一些单技术时的缺点。通过利用瞄准技术,提高计算速度,降低识别时间。
从算大角度上理解,其主要是通过一个一个的模块,当识别出每一个不同模块时,分别对其进行计数,最后汇成柱状图,根据这一柱状图和模块再进行判断和识别。
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}